2025年01月24日
ステッピングモータドライバの基本概念と仕組み
ステッピングモータドライバは、ステッピングモータを制御するための電子回路であり、基本的な概念と仕組みは以下の通りです:
基本概念:
1. ステッピングモータの制御:
- ステッピングモータは、電気信号を受け取ることで一定角度だけ回転するモータです。ステッピングモータドライバは、このモータの回転角度や速度を制御するために使用されます。
2. パルス信号の送信:
- ステッピングモータドライバは、コントロール信号としてパルス信号を受け取り、モータに対して正確なパルスを送信してステップ動作を制御します。

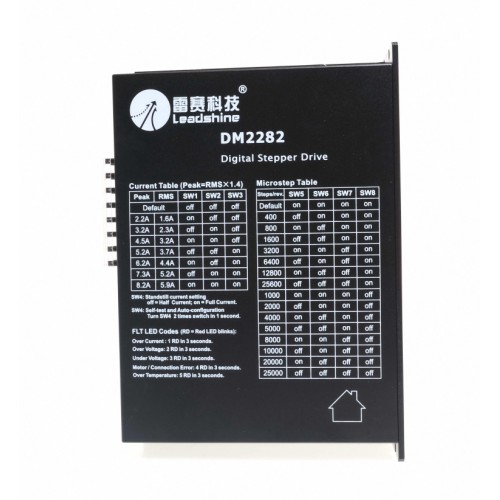
「写真の由来:Nema 34,42 ステッピングモータ用デジタルステッピングドライバ Leadshine DM2282 0.5-8.2A」
3. 電流制御:
- ステッピングモータドライバは、モータに供給される電流を制御することでトルクや動作特性を調整します。適切な電流制御により、モータの効率的な動作を実現します。
仕組み:
1. ステップ信号の生成:
- ステッピングモータドライバは、入力された制御信号を処理してステップ信号を生成します。このステップ信号はモータに送られ、1ステップ分の角度だけ回転させるように制御します。
2. モータへの信号送信:
- ドライバは、生成したステップ信号をモータに送信します。この信号はモータの各相を制御するための電流パルスとして送られ、モータを正確に制御します。

「写真の由来:Leadshine デジタルステッピングドライバ DM870 20-80VDC 0.5-7.0A (Nema 23、24、34 ステップモーターに適合)」
3. マイクロステップ制御:
- 一般的に、ステッピングモータドライバはマイクロステップ制御をサポートしています。これにより、1ステップの角度よりも細かい分解能でモータを制御することができます。
4. 保護機能:
- ステッピングモータドライバには、過電流保護、過熱保護、ショート回路保護などの機能が組み込まれており、モータやドライバを保護する役割を果たします。
ステッピングモータドライバは、ステッピングモータを効率的かつ正確に制御するための重要な部品であり、モータの性能や動作特性を最適化するために不可欠です。適切なドライバの選択と設定により、ステッピングモータの効率的な運転と安定した動作を実現することができます。
基本概念:
1. ステッピングモータの制御:
- ステッピングモータは、電気信号を受け取ることで一定角度だけ回転するモータです。ステッピングモータドライバは、このモータの回転角度や速度を制御するために使用されます。
2. パルス信号の送信:
- ステッピングモータドライバは、コントロール信号としてパルス信号を受け取り、モータに対して正確なパルスを送信してステップ動作を制御します。
「写真の由来:Nema 34,42 ステッピングモータ用デジタルステッピングドライバ Leadshine DM2282 0.5-8.2A」
3. 電流制御:
- ステッピングモータドライバは、モータに供給される電流を制御することでトルクや動作特性を調整します。適切な電流制御により、モータの効率的な動作を実現します。
仕組み:
1. ステップ信号の生成:
- ステッピングモータドライバは、入力された制御信号を処理してステップ信号を生成します。このステップ信号はモータに送られ、1ステップ分の角度だけ回転させるように制御します。
2. モータへの信号送信:
- ドライバは、生成したステップ信号をモータに送信します。この信号はモータの各相を制御するための電流パルスとして送られ、モータを正確に制御します。

「写真の由来:Leadshine デジタルステッピングドライバ DM870 20-80VDC 0.5-7.0A (Nema 23、24、34 ステップモーターに適合)」
3. マイクロステップ制御:
- 一般的に、ステッピングモータドライバはマイクロステップ制御をサポートしています。これにより、1ステップの角度よりも細かい分解能でモータを制御することができます。
4. 保護機能:
- ステッピングモータドライバには、過電流保護、過熱保護、ショート回路保護などの機能が組み込まれており、モータやドライバを保護する役割を果たします。
ステッピングモータドライバは、ステッピングモータを効率的かつ正確に制御するための重要な部品であり、モータの性能や動作特性を最適化するために不可欠です。適切なドライバの選択と設定により、ステッピングモータの効率的な運転と安定した動作を実現することができます。
2025年01月18日
スイッチング電源の基本原理について
スイッチング電源は、入力電圧を高周波のパルス信号に変換し、トランスやフィルタを通じて出力電圧を生成する方式です。以下にスイッチング電源の基本原理を簡単に説明します:
1. 入力フィルタ:
- 入力電圧をスムーズにするためのフィルタ回路があります。このフィルタは、ノイズやスパイクを除去し、安定した入力電圧を確保します。
2. 整流器:
- 入力電圧を整流して直流に変換します。一般的には、整流ダイオードを使用して交流を直流に変換します。

「写真の由来:500W 48V 10.4A 115/230Vスイッチング電源ステッピング モーターCNCルータキット」
3. スイッチング素子:
- スイッチング電源の中心となる部分であり、高速で制御可能なスイッチング素子(通常はトランジスタやMOSFET)が使用されます。このスイッチング素子は、高速でオンとオフを切り替えることで入力電圧を制御します。
4. トランス:
- スイッチング素子によって生成された高周波のパルス信号がトランスを通じて変圧されます。トランスは、入力電圧を変換し、出力電圧を生成する役割を果たします。

「写真の由来:400W 12V 33A 115/230Vスイッチング電源ステッピング モーターCNCルータキット」
5. 出力整流器とフィルタ:
- トランスから得られた出力電圧は整流器を通じて整流され、直流に変換されます。さらに、出力電圧を安定化させるためのフィルタ回路が用意されます。
6. 制御回路:
- スイッチング素子のオン・オフを制御するための制御回路があります。この回路は、出力電圧の変動を検知し、スイッチング素子の動作を調整して安定した出力電圧を維持します。
スイッチング電源は、トランスの小型化や高効率化が可能であり、様々な電子機器で広く使用されています。高周波のスイッチング動作により、コンパクトさや効率の向上が実現される一方、過渡応答やEMI(電磁干渉)の管理が重要となります。
1. 入力フィルタ:
- 入力電圧をスムーズにするためのフィルタ回路があります。このフィルタは、ノイズやスパイクを除去し、安定した入力電圧を確保します。
2. 整流器:
- 入力電圧を整流して直流に変換します。一般的には、整流ダイオードを使用して交流を直流に変換します。

「写真の由来:500W 48V 10.4A 115/230Vスイッチング電源ステッピング モーターCNCルータキット」
3. スイッチング素子:
- スイッチング電源の中心となる部分であり、高速で制御可能なスイッチング素子(通常はトランジスタやMOSFET)が使用されます。このスイッチング素子は、高速でオンとオフを切り替えることで入力電圧を制御します。
4. トランス:
- スイッチング素子によって生成された高周波のパルス信号がトランスを通じて変圧されます。トランスは、入力電圧を変換し、出力電圧を生成する役割を果たします。

「写真の由来:400W 12V 33A 115/230Vスイッチング電源ステッピング モーターCNCルータキット」
5. 出力整流器とフィルタ:
- トランスから得られた出力電圧は整流器を通じて整流され、直流に変換されます。さらに、出力電圧を安定化させるためのフィルタ回路が用意されます。
6. 制御回路:
- スイッチング素子のオン・オフを制御するための制御回路があります。この回路は、出力電圧の変動を検知し、スイッチング素子の動作を調整して安定した出力電圧を維持します。
スイッチング電源は、トランスの小型化や高効率化が可能であり、様々な電子機器で広く使用されています。高周波のスイッチング動作により、コンパクトさや効率の向上が実現される一方、過渡応答やEMI(電磁干渉)の管理が重要となります。
2025年01月13日
ACサーボモーターを選定する際の要素について
ACサーボモーターを選定する際に考慮すべき重要な要素には以下が含まれます:
1. トルク要件:
- アプリケーションで必要なトルクや負荷によって、適切なサーボモーターのトルク容量を選定します。トルク要件は、加速度や速度、負荷の種類によって異なります。
2. 精度要件:
- サーボモーターの精度は、位置決めや速度制御の正確性に直接影響します。アプリケーションの精度要件に合わせて、適切なエンコーダー分解能や制御性能を考慮します。

「写真の由来:T6シリーズ 1000W デジタル AC サーボモーター & ドライバー キット 3.19Nm (ブレーキ 、17 ビット エンコーダー付き )」
3. 応答速度:
- サーボモーターの応答速度は、アプリケーションで求められる動作速度や応答性に影響します。適切な応答速度を持つサーボモーターを選定することが重要です。
4. 負荷インピーダンス:
- アプリケーションの負荷インピーダンスに合わせて、サーボモーターの定格トルクや回転速度を選定します。負荷が変動する場合は、適切な余裕を持ったサーボモーターを選択します。
5. 環境条件:
- サーボモーターが使用される環境条件(温度、湿度、振動など)を考慮し、適切な耐環境性を持つモーターを選定します。

「写真の由来:E6シリーズ 750W ACサーボモーター&ドライバーキット 3000rpm 2.39Nm 17ビットエンコーダー IP65」
6. 制御方式:
- サーボモーターの制御方式(位置制御、速度制御、トルク制御)によって、適切な制御アルゴリズムやドライバーが必要となります。制御方式に合わせてサーボモーターを選定します。
7. コスト:
- 適切な性能を持ちながら予算内で収まるかどうかも重要な要素です。コストと性能のバランスを考慮して、最適なサーボモーターを選定します。
これらの要素を考慮して、アプリケーションの要求に最適なACサーボモーターを選定することが重要です。メーカーの仕様書や技術情報、または専門家の助言を活用して、最適な選択を行うことが推奨されます。
1. トルク要件:
- アプリケーションで必要なトルクや負荷によって、適切なサーボモーターのトルク容量を選定します。トルク要件は、加速度や速度、負荷の種類によって異なります。
2. 精度要件:
- サーボモーターの精度は、位置決めや速度制御の正確性に直接影響します。アプリケーションの精度要件に合わせて、適切なエンコーダー分解能や制御性能を考慮します。

「写真の由来:T6シリーズ 1000W デジタル AC サーボモーター & ドライバー キット 3.19Nm (ブレーキ 、17 ビット エンコーダー付き )」
3. 応答速度:
- サーボモーターの応答速度は、アプリケーションで求められる動作速度や応答性に影響します。適切な応答速度を持つサーボモーターを選定することが重要です。
4. 負荷インピーダンス:
- アプリケーションの負荷インピーダンスに合わせて、サーボモーターの定格トルクや回転速度を選定します。負荷が変動する場合は、適切な余裕を持ったサーボモーターを選択します。
5. 環境条件:
- サーボモーターが使用される環境条件(温度、湿度、振動など)を考慮し、適切な耐環境性を持つモーターを選定します。

「写真の由来:E6シリーズ 750W ACサーボモーター&ドライバーキット 3000rpm 2.39Nm 17ビットエンコーダー IP65」
6. 制御方式:
- サーボモーターの制御方式(位置制御、速度制御、トルク制御)によって、適切な制御アルゴリズムやドライバーが必要となります。制御方式に合わせてサーボモーターを選定します。
7. コスト:
- 適切な性能を持ちながら予算内で収まるかどうかも重要な要素です。コストと性能のバランスを考慮して、最適なサーボモーターを選定します。
これらの要素を考慮して、アプリケーションの要求に最適なACサーボモーターを選定することが重要です。メーカーの仕様書や技術情報、または専門家の助言を活用して、最適な選択を行うことが推奨されます。
2025年01月06日
ACサーボモーターの速度制御におけるPID制御の原理と効果
ACサーボモーターの速度制御においてPID制御を使用することで、目標速度にモーターを迅速かつ正確に制御することが可能となります。以下にPID制御の原理と効果について説明します:
PID制御の原理:
1. 比例制御 (Proportional Control):
- 比例制御は、目標速度と現在の速度の差に比例して制御信号を生成します。比例制御は目標速度に対してどれだけ追従するかを調整します。

「写真の由来:E6シリーズ 400W ACサーボモーター&ドライバーキット 3000rpm 1.27Nm 17ビットエンコーダー IP65」
2. 積分制御 (Integral Control):
- 積分制御は、過去の速度誤差の積算値に比例して制御信号を生成します。積分制御は、静止偏差をゼロにすることで、速度の定常偏差を解消します。
3. 微分制御 (Derivative Control):
- 微分制御は、速度誤差の変化率に比例して制御信号を生成します。微分制御は速度変化の予測に役立ち、振動やオーバーシュートを抑制します。
PID制御の効果:
1. 高速応答性:
- PID制御は、比例制御、積分制御、微分制御を組み合わせることで、目標速度に対して迅速に応答します。

「写真の由来:T6シリーズ 400W デジタル AC サーボモーター & ドライバー キット 3000rpm 1.27Nm 17 ビット エンコーダー IP65」
2. 定常偏差の除去:
- 積分制御を使用することで、静止偏差をゼロにすることができます。これにより、定常偏差を解消し、目標速度に近い精度の制御が可能となります。
3. 安定性と振動の抑制:
- 微分制御は、速度変化率を予測することで、振動やオーバーシュートを抑制し、システムの安定性を向上させます。
4. パラメータ調整の柔軟性:
- PID制御では、比例ゲイン、積分時間、微分時間などのパラメータを調整することで、システムの動作を最適化することができます。
PID制御を使用することで、ACサーボモーターの速度制御を効果的に行い、目標速度にスムーズに追従させることができます。
PID制御の原理:
1. 比例制御 (Proportional Control):
- 比例制御は、目標速度と現在の速度の差に比例して制御信号を生成します。比例制御は目標速度に対してどれだけ追従するかを調整します。

「写真の由来:E6シリーズ 400W ACサーボモーター&ドライバーキット 3000rpm 1.27Nm 17ビットエンコーダー IP65」
2. 積分制御 (Integral Control):
- 積分制御は、過去の速度誤差の積算値に比例して制御信号を生成します。積分制御は、静止偏差をゼロにすることで、速度の定常偏差を解消します。
3. 微分制御 (Derivative Control):
- 微分制御は、速度誤差の変化率に比例して制御信号を生成します。微分制御は速度変化の予測に役立ち、振動やオーバーシュートを抑制します。
PID制御の効果:
1. 高速応答性:
- PID制御は、比例制御、積分制御、微分制御を組み合わせることで、目標速度に対して迅速に応答します。

「写真の由来:T6シリーズ 400W デジタル AC サーボモーター & ドライバー キット 3000rpm 1.27Nm 17 ビット エンコーダー IP65」
2. 定常偏差の除去:
- 積分制御を使用することで、静止偏差をゼロにすることができます。これにより、定常偏差を解消し、目標速度に近い精度の制御が可能となります。
3. 安定性と振動の抑制:
- 微分制御は、速度変化率を予測することで、振動やオーバーシュートを抑制し、システムの安定性を向上させます。
4. パラメータ調整の柔軟性:
- PID制御では、比例ゲイン、積分時間、微分時間などのパラメータを調整することで、システムの動作を最適化することができます。
PID制御を使用することで、ACサーボモーターの速度制御を効果的に行い、目標速度にスムーズに追従させることができます。

